Simulación multidominio de sistemas en el diseño mecatrónico
Cada vez son más los fabricantes que integran componentes mecánicos, eléctricos y de software en sus productos. Estos productos mecatrónicos, compuestos por partes mecánicas y electrónicas, satisfacen las demandas de los clientes, pero introducen también una serie de retos en el diseño, como es predecir de qué forma responderán y cómo funcionarán en conjunto una gran cantidad de componentes de diferentes disciplinas integrados en un único producto. Las herramientas de software de simulación pueden ayudar a sortear estas dificultades en el diseño mecatrónico.
Por ejemplo, las herramientas de simulación multidominio realizan una aproximación esquemática en la representación y asociación de modelos eléctricos, magnéticos, mecánicos, hidráulicos y térmicos (así como otros modelos multidominio), para simular su comportamiento a nivel de sistemas de forma rápida y precisa. Estas herramientas ofrecen múltiples técnicas de modelado, en las que se incluyen circuitos, diagramas de bloque, máquinas de estados y modelado de lenguajes que, además, se pueden utilizar al mismo tiempo. Esto facilita a los ingenieros la elaboración de diseños análogos de señal mixta digital. La flexibilidad elimina la necesidad de realizar transformaciones matemáticas propensas a error y las analogías modelo que habitualmente emplean las herramientas de simulación de un solo dominio.
En el modelado de sistemas, los componentes críticos, tales como el mecanismo de encendido, un motor, un IGBT o la Bus Bar (barra de conexión de cobre), muestran muchas veces efectos físicos (como la fuerza, el par de torsión, el movimiento y la temperatura) que impactan fuertemente en los resultados. En estos casos, las herramientas de simulación multidominio que incorporan modelos basados en física son la mejor opción. Con ellas, el diseño a nivel de sistemas no sufrirá representaciones inexactas de aquellos componentes críticos que afectan drásticamente a los resultados.
Para las industrias con productos que dependen de la interacción precisa entre los componentes electromecánicos, los circuitos de poder electrónico, y el control eléctrico y mecánico basado en sistemas, este tipo de herramientas multidominio permiten el modelado preciso de los sistemas, así como la concreción de las interacciones entre los componentes electromecánicos, circuitos electrónicos y el controlador lógico, revelando la física subyacente que determina la representación final del producto.
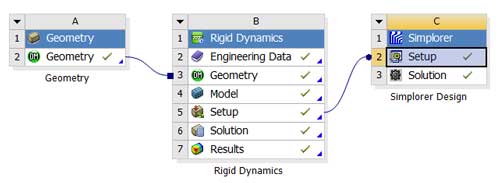

1y2. Las imágenes muestran un brazo robotizado y controlador simulados con la tecnología Simplorer y ANSYS Rigid Dynamics.











