VineRobot II, nuevo aliado para el sector vitícola internacional
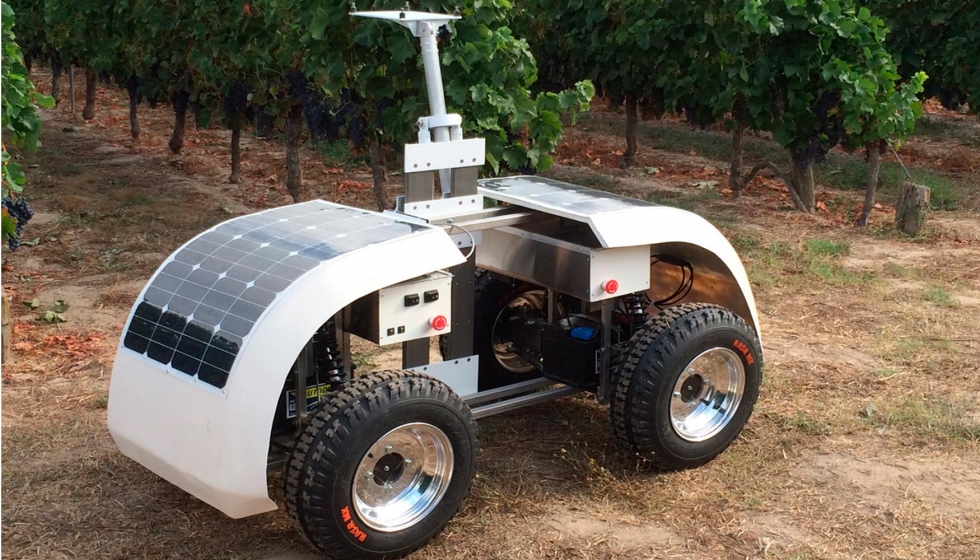
Un nuevo sensor que combina fluorescencia con visión artificial y ayuda a determinar el momento ideal para cosechar la uva, sensores de ultrasonidos, un mayor control de la autonomía de las baterías y una carrocería biodegradable que incorpora además paneles solares. Estas son sólo algunas de las novedades del nuevo prototipo de robot vitícola en el que trabajan investigadores españoles, alemanes, franceses e italianos en el marco del proyecto europeo VineRobot.
Coordinado desde la Universidad de La Rioja, entre los socios del proyecto VineRobot II se encuentra el Laboratorio de Robótica Agrícola de la Universitat Politècnica de València (UPV), responsable de la dirección técnica del proyecto. Queremos poner las nuevas tecnologías al alcance del viticultor para mejorar la gestión del viñedo y aumentar su competitividad, afirma Francisco Rovira, director del Laboratorio de Robótica Agrícola de la UPV.

Como su hermano mayor, este segundo prototipo será capaz de navegar de forma automática por los viñedos y permitirá obtener en tiempo real datos de especial relevancia para los productores, como la cantidad de nitrógeno en hojas y el nivel de antocianos en los racimos de uva.
Todos estos datos conformarán varios mapas que se podrán leer de forma muy sencilla en la pantalla del ordenador del propio robot y almacenar para su posterior análisis por cualquier usuario no especialista en robótica o tecnologías de la información.
Se trata de un robot diseñado para el viñedo, con un tamaño fácil de transportar, un funcionamiento totalmente eléctrico y recargable en cualquier enchufe, un sistema de control a través de una pantalla táctil y un manejo al alcance de los viticultores sin necesidad de conocimientos en tecnologías avanzadas, destaca Rovira.
Un proyecto con muchas novedades
Entre las innovaciones del proyecto destaca el sistema de visión artificial desarrollado en Valencia en colaboración entre los laboratorios de la UPV y del IVIA. Dicho sistema discrimina con un alto nivel de detalle en las hojas y uva en tiempo real mientras el robot circula entre las filas del viñedo.
Este alto nivel de detalle se debe a un pequeño dispositivo: Junto al sensor de fluorescencia se instaló una pequeña cámara de color que discriminaba entre hojas y frutos, con la finalidad de eliminar aquellas medidas de maduración de la uva tinta en las que había más de un 3% de materia verde, al ser la señal de fluorescencia proveniente de la clorofila presente en tallos y hojas muy intensa, y difícil de eliminar para calcular el nivel de antocianos, señala Rovira.
Esto aumenta de manera significativa la precisión de las medidas del sensor de fluorescencia, evitando interferencias por la fluorescencia proveniente de la clorofila de la vegetación; la cámara analiza un área circular de 4 cm de diámetro, donde se evalúa el nivel de fluorescencia, y estima el porcentaje de uva y el porcentaje de hoja. Solo aquellas medidas que tienen más de un 50% de uva y menos del 3% de hoja serían válidas y por tanto podrían aportar información a los mapas que se irán confeccionando en tiempo real.
Según explican los investigadores, uno de los grandes retos que implica la medida de antocianos en movimiento es que el sensor debe desplazarse a 30 cm de los racimos, lo que supone mucha precisión para un sistema de navegación autónoma. Para facilitar estas medidas, se ha mejorado en la segunda versión el soporte del sensor de fluorescencia que genera los mapas, mucho más versátil y con un montaje más sencillo, destaca Francisco Rovira.

El sistema de fluorescencia se basa en un sensor que dispara varias luces en un determinado rango espectral para producir la excitación de la clorofila de manera que ésta emita fluorescencia: La medida de esta fluorescencia según la luz de excitación permite calcular varios índices que nos llevan a estimar la cantidad de clorofila y polifenoles presentes en la planta o fruto analizado sin necesidad de tocarlo y de manera inmediata. El cociente clorofila/flavonoles, por ejemplo, nos proporciona una estimación del estado nutricional de las plantas a través del nitrógeno en las hojas.

Asimismo, la nueva red de seis sensores de ultrasonidos de VineRobot II facilitará el giro del robot e incrementará sus prestaciones de seguridad en el parachoques incorpora tres sensores, dos más en los laterales y uno trasero para evitar colisiones en maniobras con marcha atrás. Además, los dos nuevos paneles solares garantizarán 120 vatios extra, lo que permitirá que el ordenador encargado de la navegación y seguridad pueda seguir funcionando con un nivel bajo de las baterías.
Este segundo robot fue presentado junto al primer prototipo el pasado mes de septiembre en Buzet-sur-Baïse (Francia) y se espera que esté totalmente operativo a escala de laboratorio a finales del mes de mayo. El sistema de navegación fue presentado el año pasado en una conferencia internacional auspiciada por la sociedad estadounidense ASABE (American Society of Agricultural and Biological Engineers), donde recibió el premio Information technology, Sensors, and Control Systems Select Paper Award en Nueva Orleans (EE UU).

El aporte de la robótica en la viticultura
Los beneficios se pueden ver en diferentes aspectos. Desde un punto de vista tecnológico, se va a disponer de información más precisa, abundante, y con mayor frecuencia, que permitirá al viticultor tomar mejores decisiones, en algunos casos con mayor anticipación, subraya Rovira.
Desde el aspecto económico, será más fácil mantener la reputación de un vino al conocer mejor los parámetros clave para la obtención de uva de alta calidad y, sobre todo, evitar la mezcla de uvas de diferentes propiedades o grados de maduración. Cuando se producen medidas objetivas, es más probable repetir los buenos resultados de años anteriores, o al menos resulta más seguro que seguir la intuición.
Por último, y desde un punto de vista social, la introducción de nuevas tecnologías en el campo puede motivar a jóvenes agricultores, contrarrestando un grave problema que afecta a los países industrializados: la edad avanzada de la población rural.






















")