
Visión artificial en la fabricación de vehículos autónomos
Infaimon (texto e imágenes)
17/01/2024
Desafío
La mejora continua en la fabricación y funcionamiento de coches híbridos y autónomos implica desafíos constantes, especialmente en cuanto a visión artificial, ya que, a través de cámaras, ópticas y un software de visión, se recogen los datos que permiten que el vehículo funcione sin riesgos. Las cámaras de visión artificial obtienen información del entorno para alimentar a las redes neuronales que aprenden a detectar obstáculos y así guiar automáticamente el vehículo.
A través de Deep Learning (o aprendizaje automático), los algoritmos son capaces de detectar la posición del coche, aunque, muchas veces, la falta de detección real de distancia y profundidad representa un reto. La calibración, configuración y sincronización de las cámaras debe ser lo más certera posible para evitar colisiones.
Se debe tener en cuenta que el vehículo debe funcionar con la misma eficiencia en todo tipo de entornos: días soleados, nublados o de noche. Esto representa un desafío para el equipo de EcoRacing, ya que deben tener controlados factores como el filtrado de brillos o la exposición para que, mediante los sistemas de visión, se puedan obtener las imágenes especialmente a alta velocidad. Además, se utilizan sistemas multicámara, es decir, un conjunto de dispositivos que capturan imágenes de la forma más sincronizada posible considerando aspectos como las características propias de cada cámara, la posición, rotación o la conexión. La sincronización de esas cámaras para el correcto funcionamiento del vehículo fue un reto a superar entre técnicos especializados de Infaimon y el equipo de EcoRacing.
Por otro lado, el entrenamiento de las redes neuronales en múltiples contextos hace que sea necesaria una base de datos muy amplia para obtener resultados fiables y que puedan ser repetidos. La fiabilidad de estos datos es fundamental, ya que el coche debe cumplir exigentes requisitos por parte de la Fórmula Student para garantizar que es seguro.
Solución
Hardware
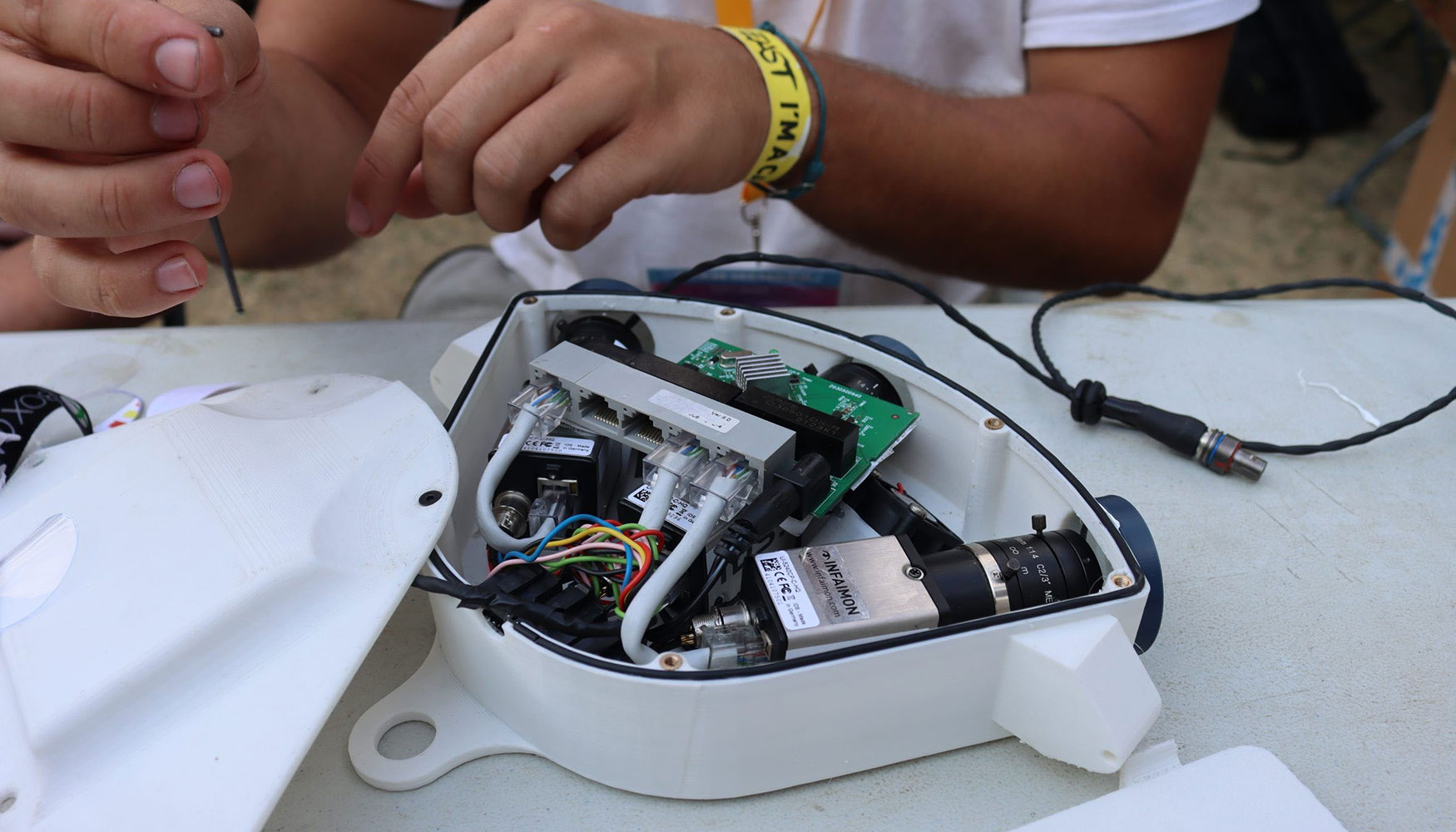
El vehículo de competición diseñado por el equipo de EcoRacing, incorpora una caja compacta con tres cámaras de visión artificial por encima del conductor: una apuntando al centro y las otras dos hacia los lados.
Las dos que apuntan a los lados, cuentan con un objetivo gran angular que detecta los conos más cercanos al vehículo, mientras que la central cuenta con un objetivo más cerrado, con el fin de alcanzar la mejor y más completa visión de los circuitos, especialmente para rectas muy largas. La incorporación de las tres cámaras posibilita una alta precisión y fiabilidad en cuanto al análisis del entorno en la conducción autónoma.
El producto seleccionado para satisfacer las necesidades técnicas del vehículo fue la cámara IDS uEye CP. Increíblemente rápida y fiable, se caracteriza por la efectividad de sus sensores y su potencia.
Las cámaras de la serie uEye CP ofrecen la máxima funcionalidad con un extenso preprocesamiento de píxeles y, gracias a la memoria gráfica interna de 120 MB para guardar temporalmente secuencias de imagen, también es perfecta para sistemas multicámara. Las cámaras proporcionan datos a velocidad GigE completa y la función PoE (Power-over-Ethernet) hace posible el funcionamiento con un solo cable de hasta 100 metros.
Software
El software de visión utilizado es Halcon, ideal para uso en sistemas integrados y personalizados. Halcon cuenta con un entorno de desarrollo integrado (HDevelop) y proporciona un rendimiento excepcional y un soporte integral de plataformas multinúcleo, conjuntos de instrucciones especiales como AVX2 y Neon, así como aceleración de GPU. El software proporciona las tecnologías de visión artificial de última generación, como visión 3D integral y algoritmos de Deep Learning.
El sistema permite optimizar las redes neuronales para hacer sistemas mucho más ligeros aplicados al coche. El software Halcon se ha utilizado, principalmente, para realizar la calibración de los intrínsecos del sistema de percepción. Actualmente, el equipo se encuentra investigando otras de las diversas y potentes herramientas que este programa ofrece, especialmente el potencial que tiene en la optimización de códigos.
La correcta elección tanto de hardware como de software es fundamental no solo para el funcionamiento del vehículo, sino también para garantizar el cumplimiento de los requisitos de la Fórmula Student. Las pistas de las competiciones utilizan un formato concreto (ya que se delimitan mediante conos de medidas conocidas).
Deep Learning y vehículos autónomos
Esto hace que el uso de las cámaras junto los algoritmos de Deep Learning sea una combinación ideal, dado que estos algoritmos nos permiten hacer la clasificación de los conos que detectamos las imágenes, para luego proyectarlos según cómo de grandes se ven, y así poder generar la trazada idónea.

Los algoritmos de Deep Learning utilizados resultan de gran utilidad para el equipo de trabajo, ya que son muy rápidos y precisos, pero a la vez accesibles para la capacidad del equipo ante la necesidad de generar bases de datos suficientemente amplias para la detección de objetos y segmentación de imágenes.
Finalmente, para encontrar la precisión y certeza de los datos, el equipo replica una visualización 3D para comprobar la performance del vehículo y detectar posibles errores. Además, se monitorizan los cálculos que está haciendo el algoritmo.
Resultado
El equipo de EcoRacing ha obtenido múltiples logros tanto a nivel nacional como internacional, como se puede ver aquí:

Para seguir sumando logros, el equipo se plantea mejoras tanto a nivel técnico como interno. El próximo objetivo es volver a las competiciones y poder completar los eventos dinámicos, que consiste en una demostración del vehículo en funcionamiento. Además, se busca fiabilizar los sistemas para que cada vez sean más independientes del usuario, lograr más precisión y seguridad.
Los principales retos se focalizan en las competiciones de la Formula Student 2023 (Netherlands, Alemania y España) y en la mejora constante de los vehículos autónomos.
Sin embargo, el éxito de este proyecto no termina en premios y reconocimientos en los medios: uno de sus objetivos y diferenciales es la sostenibilidad. El desafío de diseñadores e ingenieros es, además de hacer un vehículo eficiente, llevar el proyecto adelante implementando prácticas sostenibles. Los coches son totalmente eléctricos y el proceso de manufactura también responde a este objetivo. Por ejemplo, los inserts (piezas del chasis en las que se unen todos los componentes externos al chasis), donde el estándar de la industria sería utilizar aluminio mecanizado, se utilizan piezas de madera (más de 82 piezas en total). Otro punto donde se ve el afán de la reducción de la huella de carbono es en el asiento del piloto, una pieza de gran superficie que es realizada con fibras naturales de lino.
Por la parte de visión se busca validar todos los sistemas sin tener que hacer pruebas físicas, es decir, en entornos virtuales. El validar los algoritmos en el mundo virtual, permitiría automatizar los entrenamientos de la red neuronal.
A través de Deep Learning (o aprendizaje automático), los algoritmos son capaces de detectar la posición del coche, aunque, muchas veces, la falta de detección real de distancia y profundidad representa un reto. La calibración, configuración y sincronización de las cámaras debe ser lo más certera posible para evitar colisiones












