Festo actualiza su BionicSoftHand con un sistema de robot móvil
Festo, proveedor mundial de soluciones de automatización, ha presentado su última versión de la BionicSoftHand 2.0, que se une a un sistema de robot móvil, el BionicMobileAsistant. El sistema robótico puede moverse de forma independiente en tres dimensiones, identificar objetos, agarrarlos de forma adaptativa y operar junto a las personas.

Desarrollo adicional de la BionicSoftHand 2.0
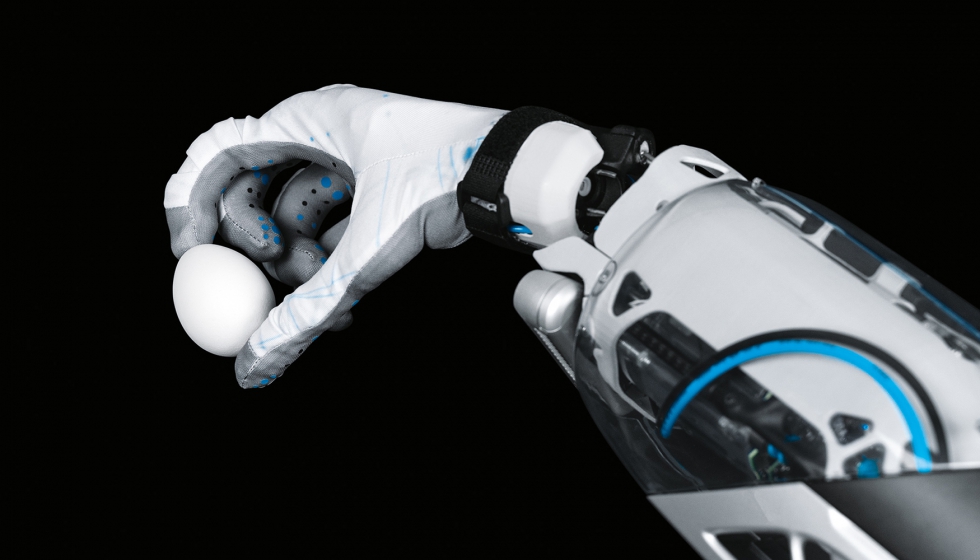
Todo el sistema, desarrollado en colaboración con ETH Zürich, tiene un diseño modular y consta de tres subsistemas: un robot móvil, un brazo robótico eléctrico y la BionicSoftHand 2.0, la pinza neumática de Festo inspirada en la mano humana. Para permitir que lleve a cabo los movimientos de manera realista, los dedos y el pulgar están formados por estructuras flexibles de fuelle con cámaras de aire, rodeadas por un tejido firme pero flexible. Gracias a ello se consigue una mano ligera, adaptable, sensible y capaz de ejercer gran fuerza.
Con el objetivo de mejorar la maniobrabilidad del pulgar y el dedo índice, respecto a la primera versión de la BionicSoftHand, se ha aumentado el rango de giro lateral de ambos dedos, consiguiendo mejor agarre y precisión. Además, con la incorporación de una muñeca impresa en 3D, la mano puede moverse hacia delante y hacia atrás, así como de izquierda a derecha. Esto le confiere un mayor radio de movimiento en espacios reducidos.
Para aumentar la estabilidad de los dedos, las cámaras de aire ahora contienen dos elementos estructurales que actúan como huesos. Además, un sensor de flexión determina las posiciones de las yemas. La mano también usa un guante con sensores táctiles de fuerza en la punta de los dedos, la palma y los lados exteriores. Esto le permite percibir las características del elemento que se va a agarrar para adaptar su fuerza de sujeción, tal y como hacen las personas.

Detección de objetos
La BionicSoftHand 2.0 dispone de una cámara de profundidad en el interior de la muñeca que le permite detectar visualmente los objetos. Con esta tecnología, el biónico puede identificar y agarrar una gran variedad de elementos, incluso si están parcialmente cubiertos. La visión le permite recopilar datos que se procesan mediante una red neuronal.
El nuevo biónico se desplaza gracias a un robot móvil sobre una rueda esférica (ballbot). Esto significa que el BionicMobileAssitant puede moverse libremente en cualquier dirección. Todo el sistema de suministro de energía está a bordo: la batería para el brazo DynaArm y el ballbot se encuentra en el cuerpo y el cartucho de aire comprimido para la pinza neumática está instalada en la parte superior del brazo. Ello le permite funcionar de forma autónoma, mientras se orienta en tres dimensiones gracias a dos cámaras.

Múltiples aplicaciones
La nueva BionicSoftHand 2.0 puede usarse en una amplia gama de aplicaciones. El sistema sería perfecto como robot de servicio o para ayudar a liberar a los trabajadores de tareas ergonómicamente extenuantes, monótonas o dañinas para la salud.
Otra utilidad podría estar en entornos donde las personas no pueden trabajar debido a riesgos o a accesibilidad restringida. También es posible imaginar robots móviles realizando tareas más simples donde el personal no puede acceder debido a infecciones. Por ejemplo, un posible escenario futuro podría ser un sistema que trae bebidas y alimentos a las mesas de los restaurantes o que entrega medicamentos a los pacientes de los hospitales.