Proyecto europeo BADGER: Robot subterráneo inteligente para entornos urbanos
El objetivo de este proyecto coordinado por el Robotics Lab de la UC3M, en el que participan investigadores de Alemania, Grecia, Italia y Reino Unido, es desarrollar un sistema inteligente para la excavación autónoma de túneles de pequeño diámetro y de alta pendiente en entornos urbanos. El empleo de técnicas innovadoras de localización, mapeo y navegación, así como de sensores y georadares, permitirán su adaptación a distintos terrenos, facilitarán el análisis del entorno de trabajo y la toma de decisiones para la consecución de los objetivos, explica el coordinador del proyecto, Carlos Balaguer, catedrático del departamento de Ingeniería de Sistemas y Automática de la UC3M.
BADGER (roBot for Autonomous unDerGround trenchless opERations, mapping and navigation) se constituye como un proyecto que acoge varias innovaciones. La principal es esta nueva aplicación a un entorno subterráneo de la robótica, una disciplina que hasta ahora estaba centrada sobre todo en robots en superficie andante o rodante, robots voladores o submarinos. La navegación autónoma, por su parte, es otro de los puntos fuertes del proyecto, pues todos los sensores, georadares y computadoras estarán integrados en la máquina, lo que posibilita una exploración del terreno mucho más precisa y controlada. Por último, la utilización de técnicas de ultrasonido para perforar los terrenos, acompañada de una impresora 3D a bordo del propio robot con el objetivo de reforzar el túnel por donde circulen los cables o las tuberías, juega también un rol esencial.
Sostenibilidad de las ciudades y apoyo en labores de rescate
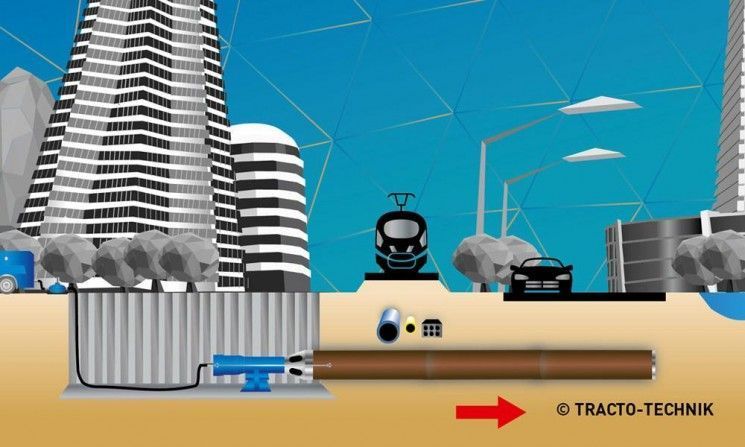
BADGER es un robot marcadamente ecológico, según los investigadores, ya que posibilita una transformación sostenible de entornos muy congestionados, como pueden ser, por ejemplo, las ciudades modernas. De esta forma, contará con un sistema inteligente que permitirá la ejecución de tareas de construcción de instalaciones (cableado y canalización) sin zanjas ni desvío de tráfico. Dado que todo el proceso transcurrirá bajo tierra, la contaminación, tanto acústica como de polución, se verá reducida, comentan los investigadores.
La introducción de estas tecnologías robóticas avanzadas, con capacidades cognitivas y de control, tiene múltiples aplicaciones. Incrementará notablemente la competitividad europea en operaciones de búsqueda y rescate (derrumbamientos ), extracción de minas, aplicaciones con uso civil (como conducciones de aguas, gas, fibra óptica ), técnicas de exploración, mapeo, etc, señala Carlos Balaguer.
BADGER es uno de los ocho proyectos seleccionados en la convocatoria ICT-25-2016, de la iniciativa Leadership in Enabling and Industrial Technologies y está financiado a través de Horizonte 2020, el Programa Marco de Investigación, Desarrollo Tecnológico e Innovación de la Unión Europea (referencia número GA 731968). En este consorcio de investigación coordinado por la UC3M, colaboran investigadores de la Escuela de Ingeniería de la Universidad de Glasgow (Escocia, Reino Unido), del Centro de Investigación y Tecnología Hellas (Grecia), de IDS Georadar Srl (Italia), de Singular Logic S.A (Grecia), de Tracto-Technik GMbH & Co. KG (Alemania) y de Robotnik Automation SLL (España).