3D digitising

There are various 3D scanning systems, which can mainly be divided into two groups: contact or systems without contact with the object to scan.
Scanning by contact
Currently, there are heads of digitalization in continuous (SP 600 of Renishaw, see photo). Data acquisition speed increases significantly with respect to conventional headsets, because they are not separated from the surface to digitized.
Another kind of 3D scanning contact system are articulated arms of manual operation. These have a high precision; but on the other hand they have a very low data acquisition speed, because you need to manually bring the tip to each point you want to scan, with which the digitization of a medium-sized object is very expensive.
To use these systems by contact, requires that the pieces have enough stiffness so they deformed does not contact the tip and because of the geometry of the tips, it is impossible to digitize some slots and Interior angles; but they have a high resolution.
Scanning non-contact
Techniques of passive vision
This general principle may improve with more elaborate camera models or using two cameras, what is known with the name of Photogrammetry. The stereoscopic vision presents the interest of being able to give the position in 3D of points on surfaces regardless of the specific lighting (passive vision).

Techniques of active vision
These optical systems are always at least a light transmitter and a receiver. Knowing the direction of the emitted beam and received the dimensions of the formed triangle are obtained and therefore to obtain the depth of the inspected item.
There are three types of optical systems:
2.1 Scanning laser
The source of light in these systems is a diode laser. This laser is planning a line of light on the surface we are going to digitize. The reflected light will be detected by one or two photosensitive cells that are located on both sides of the laser. These detectors read the beam of light reflected and transmitted information on the profile of the piece to a software. The result of scanning gives us the possibility of a reverse engineering, i.e., obtain the full geometry of the workpiece irrespective of the levels.
In this system the emitter is a white light projector and the receiver a CCD camera.
When starts scanning the projector launches a series of vertical light stripes of light on the subject and shadows alternate, that they are recorded by the camera. To obtain the coordinates of points scanned by triangulation, it could mathematically said that projector system is a transmitter of planes of light and the CCD camera a receiver of straight lines. Calculation of depth is to solve the plano-recta intersections.
2.3 Telemetry
Telemetry is to measure the time of route of a (laser) light beam to the surface of measure. It can be measured in two ways (with the measurement of time of flight or the calculation by phase difference). In the first case the data are obtained by measuring the time between the emission of the light impulse and the observation of the return. The second regulates the luminous momentum following a frequency of finished and the gap between the emitted beam and returnee light is measured.
The process of reverse engineering
(a) digitalization of the piece
- Definition of parameters of work.
- Selection of the appropriate lens, depending on the size and geometry of the workpiece and the required precision.
- Adjust the power of the laser to beam to reflect properly on the surface of the piece.
- Placement of the piece.
With the 3D scanner carried out sweeps of the object from different points of view. Each scan gives rise to a map of depth (range map) of the visible area to the apparatus, and associated with each point captured with the color information.
These maps of depth are treated to eliminate areas with defects or elements unrelated to the piece.
Different maps are transformed into meshes of triangles (mesh).
Align different meshes and docks for one model of 3D triangles.
Editing operations are needed to correct small errors, simplify redundant data and smooth the mesh.
Optimized once the mesh can be exported to an STL file (for the realization of a prototype or continue with the process of reverse engineering).
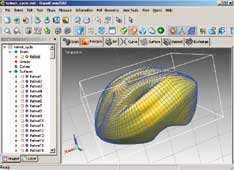
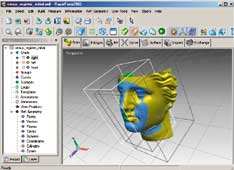
The RapidForm allows for NURBS surfaces from the mesh of triangles 3D.
The way of doing this is through the creation of four curves on the mesh to be a closed area, and the subsequent construction of the NURBS surface defined within it and approaching such a mesh.
Obtained surfaces must be more like possible triangles 3D mesh, this is carried out a verification of the error as you approach the surface model into triangles.
With the acquisition of the laser digitizer and the processing software point clouds, along with the head of palpation in continuous Renishaw SP 600, AIJU provides a range of new services that are intended to solve the problems of the companies moldistas, paste-up and processing of plastics, providing a complete and perfect service that adapts to the technological needs of the market. For this reason, digitization services include:
- Obtaining of the model in mesh polygons for the realization of prototypes, 3D catalogs, etc.
- Extraction of curves.
- To obtain the model surfaces.
- Reverse engineering of the model.
- Dimensional control of the piece by comparison with CAD file.