Dummy Tool, la herramienta de IA de Aitiip para optimizar la colaboración humano-robot en producciones industriales
Entre las distintas líneas de investigación en las que Aitiip Centro Tecnológico se encuentra inmerso, destacan la robótica avanzada y el desarrollo de innovadores sistemas cognitivos de precisión, destinados a mejorar la automatización de la producción en entornos industriales. En el marco del proyecto Sharky, circunscrito a la convocatoria OC2-Trinity del programa H2020 de la Unión Europea, el equipo de ingenieros de Aitiip ha creado una novedosa herramienta ergonómica llamada Dummy Tool. El uso de este dispositivo optimizará la programación robótica y la colaboración humano-robot en las líneas de producción, especialmente en la industria mecánica pesada.
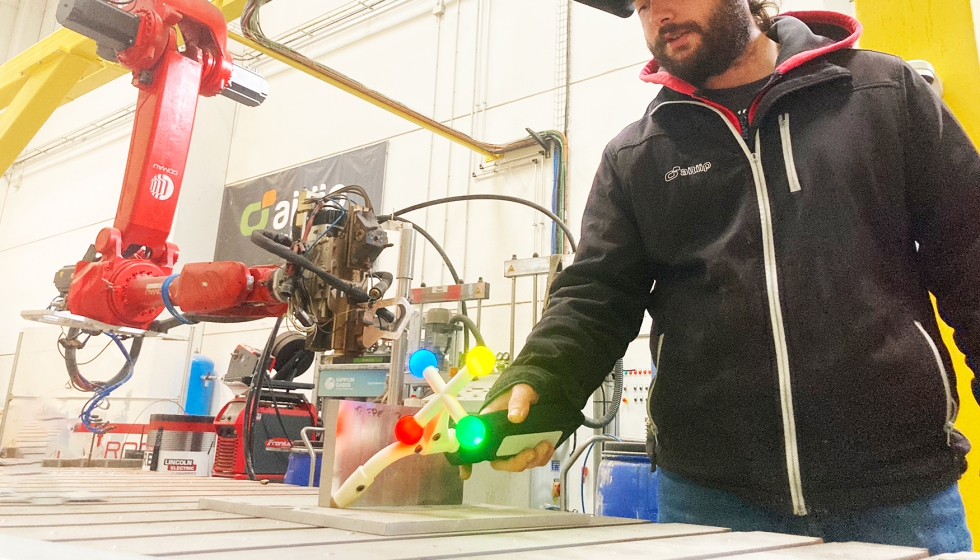
La Dummy Tool es un sistema de producción ágil que otorga al operador un alto grado de autonomía de movimiento, pues, con muy poco esfuerzo, permite realizar capturas de trayectorias espaciales dentro de la celda de trabajo, en seis grados de libertad. Es un aparato ligero y ergonómico que el operador sujeta fácilmente con su mano, mientras va recorriendo la ruta en la que se requerirá al robot trabajar. Pulsando un interruptor, a tiempo real, un sistema de cámaras grabará la información visual del tramo concreto, para transformarla después en coordenadas 6D.
Dicha información será transmitida al robot directamente para que clone el movimiento que previamente el operario ha trazado con sus gestos. Gracias a este sistema, además de optimizar en un 50% la fabricación en tiempo y precisión, los trabajadores se expondrán a menos riesgos a la hora de realizar, por ejemplo, dificultosas operaciones industriales de corte o soldadura físicamente muy demandantes, en las que además quedan expuestos a niveles lumínicos perjudiciales para la salud.
La tecnología de Sharky, actualmente aplicable a la industria naval (embarcaciones de recreo y rescate), permitirá reducir asimismo las fases de inspección previas o de preparación del 'set up' de trabajo, e incluso disminuirá la generación de desechos en planta en un 30%. Para el desarrollo de esta herramienta se han incorporado procesos de machine learning y fabricación aditiva (impresión 3D).
El sistema, además, dispone de una capa de inteligencia artificial (IA) que refina las trayectorias captadas, ajustándolas a la geometría de las piezas sobre las que ha de trabajar el robot. Al mismo tiempo, suaviza la propia trayectoria, eliminando ruidos y perturbaciones inducidos por el operario. De este modo, el resultado dejará una curva suave y geométricamente consistente que se adecúa perfectamente a la superficie de trabajo.

Consorcio europeo
El proyecto Sharky pertenece a la convocatoria Trinity Call-2 del Horizonte 2020 de la Unión Europea, que tiene como objetivo financiar iniciativas que fomenten el desarrollo de soluciones robóticas avanzadas para la industria europea del presente y el futuro. En Sharky participan un total de tres socios de España e Italia: la empresa Sharksilver, la Universidad de Bolonia y Aitiip Centro Tecnológico.
La Dummy Tool, creada por el equipo de ingenieros de Aitiip en el marco del proyecto europeo Sharky, es un dispositivo ergonómico de producción ágil que va a mejorar la programación robótica de trayectorias industriales complejas