Diseño y verificación del tratamiento de mejora del terreno mediante compactación dinámica. Aplicación a un caso real
En este artículo se describe una obra de mejora del terreno con compactación dinámica realizada para una nave industrial, en las afueras de Madrid. Esta descripción incluye tanto el proceso de diseño para alcanzar el objetivo de mejora del terreno especificado en proyecto, como la fase de verificación en áreas de prueba y los controles de ejecución y de resultados durante la ejecución de los trabajos. Además de lo anterior, se presta especial atención a la ejecución de la obra en sí, con una grúa dotada de un sistema especial de control del impacto de la pesa en el terreno y se plantea la instalación de un sistema que mida, de modo automático, el descenso de la pesa, golpe a golpe.
En el capítulo referido al diseño, se analizan los métodos empíricos existentes, cuyas predicciones se verifican en las áreas de prueba. Asimismo, en lo relativo al control de ejecución se analizan los datos obtenidos en cada punto de impacto, en las distintas fases de la obra. En el caso particular del control de resultados, se estudian tanto los datos dados por el control topográfico como los dados por los ensayos de penetración tipo DPSH y por los ensayos de sísmica pasiva. Finalmente, se obtienen conclusiones sobre cada uno de los aspectos anteriores y se proponen nuevos desarrollos a aplicar en trabajos futuros de características similares.
1- Introducción
En la compactación dinámica la mejora del terreno se logra mediante la densificación provocada por la aplicación repetida, en puntos convenientemente espaciados de la superficie del mismo, de impactos de gran energía.
2- Tipos de compactación dinámica
Actualmente, existen dos variantes de compactación dinámica: la clásica (CDC) y la rápida (CDR). En la CDC, los impactos se dan con una pesa que se levanta con una grúa y se deja caer, libremente, sobre la superficie del terreno. A su vez, en la CDR, la pesa se levanta con un sistema hidráulico y se deja caer sobre una zapata que está en contacto con el terreno.
En la obra que se describe en el apartado 4 se utilizó la CDC pero con una mejora importante. Dicha mejora consistió en dotar a la grúa de un sistema denominado kit de compactación dinámica el cual permite programar la altura de caída de la pesa y el número de golpes a dar en cada punto, además de frenar, automáticamente, el sistema justo en el momento del contacto de la pesa con el terreno. De este modo se evitan los problemas que surgían cuando esta operación se hacía de forma manual. Estos problemas eran básicamente:
- Pérdida de seguridad por cabeceo de la grúa cuando se frenaba la pesa justo antes del contacto con el terreno.
- Pérdida de rendimiento al desenrollarse el cable de acero que sostiene la pesa, cuando ésta se detenía justo después del contacto con el terreno.
Debido a lo anterior, además de mejorar notablemente la seguridad, se aumenta significativamente la producción de la obra, que pueda llegar a duplicar a la que se obtiene con los sistemas sin el kit mencionado.
Como mejora del kit de compactación dinámica, se está desarrollando en la actualidad un sistema automático de medida del descenso de la pesa, golpe a golpe.
3- Diseño
3.1- Suelos en los que puede aplicarse
En la Figura1 se clasifica a los suelos en adecuados, no adecuados e intermedios, de cara a su densificación con compactación dinámica, en función de su granulometría, que está directamente relacionada con su permeabilidad.
...")
Figura 1. Aplicación de la CD en función del tipo de suelo: 1- adecuados, 3 - no adecuados, 2 intermedios (Lukas, 1995).
3.2- Profundidad máxima que puede alcanzarse
En función de los datos obtenidos en seis casos reales (Armijo, 1995) y de los estudios de Mayne y otros (1984), la profundidad de influencia, D, de la CDC vendría dada, aproximadamente, por la siguiente fórmula (Mayne y otros, 1984):
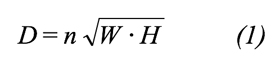
en la cual W es el peso en toneladas de la masa que se deja caer, H es la altura de caída en metros y n es un coeficiente que varía entre 0.6 (gravas y arenas limpias) y 0,35 (arenas limosas y limos con IP =10 %), aproximadamente. Teniendo en cuenta lo anterior y las capacidades máximas de las grúas normalmente disponibles (H =30 m, W =20 t), se puede concluir que para la CDC las D máximas varían entre 7 y 12 m, aproximadamente.
3.3- Grado de mejora que puede obtenerse
Así como sobre D, además del tipo de suelo, influye fundamentalmente la energía entregada en cada impacto (W, H), en el grado de mejora que puede obtenerse influye principalmente la cantidad de energía aplicada por unidad de superficie o energía específica (Ee). En relación con esto, en la Figura 2, basada en los datos dados por Mayne y otros (1984) y en seis experiencias locales (Armijo, 2004), se observa la mejora que puede lograrse en términos de golpeo de SPT (N) y de resistencia por punta de CPT (qC), para distintos valores de Ee, definida como:
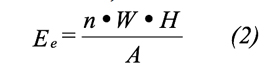
donde n es el número de golpes en cada punto y A su área de influencia.

4. Aplicación a un caso real
4.1- Introducción
Durante los meses de noviembre y diciembre de 2014, Geocisa realizó el tratamiento de mejora del terreno mediante compactación dinámica para la cimentación de una Nave Industrial en el Polígono Casablanca de Torrejón de Ardoz (Madrid). El tratamiento se realizó mediante la técnica de CDC en un área de unos 11.864 m² con espesores de rellenos antrópicos entre 2.0 y 4.5 m.
4.2.- Diseño del tratamiento
4.2.1- Bases de partida
El dimensionado del tratamiento se realizó en base a la información recogida en el Estudio geotécnico de unas parcelas industriales en el Polígono T2 de Torrejón de Ardoz, Madrid. Según este informe, el terreno consistía en unos 4-5 m de rellenos (divididos a su vez en rellenos controlados e incontrolados); suprayacentes a una capa de gravas cuaternarias, de entre 0,5 y 1 m de potencia; y a continuación arcillas limosas firmes a duras, que se engloban dentro de los materiales terciarios de la cuenca de Madrid.
4.2.2- Aplicabilidad
Como se ha visto en puntos anteriores, la aplicabilidad de la compactación dinámica está muy condicionada por la naturaleza del terreno, estando especialmente indicada para suelos colapsables tipo escombreras y vertederos. El terreno a mejorar, presentaba dos tipos de rellenos antrópicos cuyas características se adjunta en el Tabla 1:

Aplicando la clasificación de Lukas (Figura 1) el terreno a mejorar se encontraría entre las zonas 1 y 2, es decir, se trataría en principio de suelos adecuados para la compactación dinámica.
4.2.3- Diseño
Inicialmente, se diseñó el tratamiento mediante malla cuadrada de 5 x 5m con la disposición de la Figura 3.


Fotografía 1. Masa utilizada.
En base a las características del terreno y aplicando las correlaciones anteriores se planteó el siguiente tratamiento, siempre sujeto a confirmación al comienzo de los trabajos por medio de controles topográficos (descenso de huella) y ensayos de penetración dinámica tipo DPSH:

Se observa que la especifica de tratamiento alcanzó los 422 t m/m2 (Tabla nº2), que según la Figura 2, correspondería a los valores necesarios para compactar un relleno heterogéneo o arcilloso.

Además, debido a la alta energía específica que fue necesaria aplicar para mejorar la parte inferior del relleno (de mayor espesor del inicialmente previsto) y con el objetivo de mejorar las capas superficiales para darle continuidad al tratamiento en todo el espesor de rellenos, se aplicó una fase adicional de planchado en malla 2x2, con los siguientes parámetros:

Tabla 3. Parámetros para la fase de planchado.
De esta forma, la energía total aplicada después de las tres fases más el planchado fue de 560 m Ton/m2.

Fotografía 2. Ejecución del tratamiento.
4.2.4- Criterios de aceptación
El objeto del tratamiento anterior era con la citada propuesta, lograr un asiento total del relleno mejorado de 3 mm aproximadamente para una carga aplicada de 1,2 t/m2, en un espesor de rellenos de 5 m. Por tanto, el módulo de elasticidad medio del terreno mejorado debía ser superior a 20 MPa.
La estimación del módulo de deformación E se realizó por tres métodos: métodos directos (ensayos de penetración dinámica tipo SPT o DPSH), métodos indirectos (ensayos geofísicos), y método semi-directo (medidas del descenso de huella).
4.2.5- Verificación de resultados
Los ensayos para controlar y estimar el grado de mejora son:
- Ensayos SPT (en sondeos) y DPSH. Son lentos y entorpecen la ejecución de la obra.
- Ensayos de Geofisica (CSW). Rápidos de ejecución, pero es necesario un análisis posterior en gabinete.
- Control topográfico de la profundidad de la huella

Fotografía 3. Control topográfico de profundidad de huella.

Fotografía 4. Control mediante ejecución de sondeos.
Los ensayos de penetración tipo DPSH y SPT, debido a su naturaleza dinámica son particularmente sensibles a la presencia de presiones de poro residuales y pueden causar una licuación rápida de la capa que atraviesan, produciendo, en consecuencia, golpeos inferiores a los esperados.
Este fenómeno es mucho más notable en los ensayos DPSH que en los SPT, debido a su naturaleza continua, lo cual genera vibraciones sostenidas que acaban causando la licuación de las capas de terreno saturadas por encontrarse:
- por debajo del nivel freático,
- en la zona de ascenso capilar inmediatamente por encima de él o
- en la zona superior, con aporte de aguas superficiales (lluvia, riegos, etc.).
Teniendo en cuenta lo anterior, para evaluar el grado de mejora obtenido con la compactación dinámica, se tuvieron en cuenta los resultados de los ensayos sísmicos (CSW), de los SPTs y el control del descenso medio neto de la superficie del terreno.
4.2.6- Control mediante reconocimiento geofísico (CSW)
Para cuantificar el grado de mejora del terreno tratado se realizó un reconocimiento por métodos geofísicos en el que se caracterizó la velocidad de propagación de diferentes tipos de ondas por el terreno, parámetro que está íntimamente relacionado con las características mecánicas del medio (el módulo de deformación es directamente proporcional al cuadrado de la velocidad de las ondas). Se consideró que el método más adecuado para este reconocimiento era el método CSW ya que está reconocido como una herramienta muy eficaz para la caracterización de suelos.
Las medidas CSW se realizaron en un total de 11 puntos distribuidos dentro de la parcela tratada. La frecuencia y el espaciamiento entre sensores se ajustaron para realizar un reconocimiento detallado del subsuelo hasta más de 8 metros de profundidad.
")
Fotografía 5. Control mediante registro de ondas superficiales (CSW).
De los resultados de los ensayos geofísicos se dedujo lo siguiente:
- Rellenos compactados (de 0 a 2.5 m de profundidad): Se observó que tras la fase de planchado existía un aumento de la velocidad de Vs hasta alcanzar valores ligeramente superiores a 200 m/s.
- Rellenos incontrolados (a partir de 2.5m de profundidad): Se observó una mayor dispersión en los datos debido a la heterogeneidad del material. No obstante, al finalizar el tratamiento, la velocidad Vs estaba comprendida entre 230 y 288 m/s.
A partir de la velocidad de onda Vs se puede estimar un valor de N30 del ensayo SPT aplicando las correlaciones habituales en geotecnia en función del tipo de suelo:
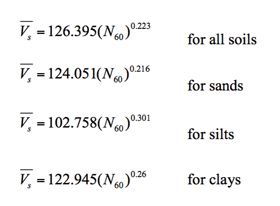
Posteriormente, usando las correlaciones habituales se llegó a estimar el módulo de Young (E) para cada tipo de terreno. Así para rellenos compactados situados hasta 2.5 m de profundidad, con velocidades de Vs del orden de 200-210 m/s, se les podría atribuir un módulo de Young (E) del orden de 13-15 MPa. A partir de 2.5 m de profundidad la velocidad de onda Vs oscila entre de 230 hasta 290 m/s, aumentando por tanto E hasta valores comprendidos entre 19 y 43 MPa, respectivamente.
El valor medio de E para todo el espesor de rellenos, se puede estimar en 26 MPa según se adjunta en la Tabla 5.
4.2.7- Control mediante sondeos geotécnicos
Tras finalizar el tratamiento de compactación se realizaron cuatro sondeos geotécnicos con ensayos SPT cada metro para caracterizar la compacidad del terreno.
La ubicación de los sondeos se seleccionó cumpliendo el doble objetivo de estar en zona con el tratamiento ya finalizado y cercano a algún reconocimiento previo al tratamiento para comparar resultados.
Se observó que el espesor medio de los rellenos era de 6.3 m, es decir superior hasta en 1.2 m al espesor inicialmente marcado en el estudio geotécnico.
Respecto al Nivel Freático, se observó que entre 0.6-1.0 m de rellenos se encontraban saturados. Este dato se considera muy importante ya que la compactación de terreno saturados está condicionada a la disipación de presiones intersticiales que se realiza con el tiempo, por lo que es de esperar una mejora en la compacidad de los rellenos bajo el NF, que con el tiempo podría llegar a un 30%. Con los resultados de los ensayos SPT y usando las correlaciones habituales de geotecnia se estimó el valor del módulo de Young (E) para cada tipo de terreno, llegándose a la conclusión que para los primeros 2.5 m de relleno se puede estimar un módulo de Young superior a 20MPa, con un valor medios para la totalidad de los rellenos de 35MPa, valor superior al estimado mediante métodos geofísicos (26 MPa). Esta diferencia puede ser debida a que la estimación del E mediante el ensayo SPT es directa, mientras que la estimación a través de ensayos geofísicos es indirecta.
4.2.8- Verificación mediante el control de profundidad de huella
Para evaluar el grado de mejora del terreno se llevó a cabo un control de descensos producidos durante el tratamiento. Este descenso se puede asimilar a una disminución de la porosidad del terreno que está directamente relacionado con el módulo de deformación.
Así, suponiendo un espesor medio de rellenos de 5 m y un descenso medio de huella de 1.5 m y una área de la maza de 4 m2 (cuadrada 2x2 m) la variación de la porosidad (Δn) sería:
- Vtotal= 2*2*5=20 m3
- Vhuella= 2*2*1.5=6 m3
Δn= 6/20=0.3
y la variación el índice de huecos(Δe):
El índice de compresibilidad CC se define como:
Siendo:
P1=presión inicial= 4.5 t/m2 (tensión vertical en el punto medio de los rellenos)
P2= Presión aplicada por el impacto
A su vez P2 se define como:
V2=2gh
A= área de aplicación de la presión en el punto medio del estrato= 9m2
g= aceleración gravedad= 9.81 m/s
W= peso de la maza=20 t
h= altura de caída= 14m
S= huella media: 1.5m
Operando, se obtiene: P2= 20.7 t/m2
Que multiplicado por el número de golpes (16 golpes), da:
P2 total= 331.9 t/m2
Y por tanto Cc= 0.24
y el módulo edométrico:
Siendo
e0= porosidad inicial (0.6 estimada)
CC= índice de compresibilidad:0.23
Operando: Em= 5331 t/m2
Y el módulo de Young, por tanto:
Considerando un valor del coeficiente de Poisson de 0.35, el valor medio del módulo de deformación para los rellenos es:
E= 33 MPa
Se observa que es un valor intermedio entre el estimado con métodos directos (SPT) de 35MPa (SPT) e indirectos (CSW) 26MPa.
5- Conclusiones
En este artículo se revisa la aplicación de la compactación dinámica clásica para densificar el terreno en profundidad, con una mejora importante en la ejecución, consistente en la introducción de un kit de compactación dinámica.
En primer lugar se describe la técnica, el equipo que se utiliza y las energías por impacto y por unidad de superficie o energía específica, que normalmente se aplica. A continuación se analiza, la profundidad máxima alcanzada y el grado de mejora obtenido en función de las energías aplicadas y del tipo de terreno tratado.
Finalmente, se presentan los métodos de control de ejecución y de resultados existentes y se hace una comparación, por medio de la aplicación a un caso real, entre tres métodos de control de resultados: técnicas geofísicas, sondeos geotécnicos con ensayos SPT, y control de huella, obteniéndose valores muy similares entre los tres.
Respecto al control de huella, se propone una metodología a seguir para obtener un módulo de deformación resultante que verifique las hipótesis de diseño. Esta metodología se podrá aplicar de un modo más eficaz cuando se disponga del sistema de control automático de descenso de la pesa, golpe a golpe, que se menciona en el apartado 2.
6. Agradecimientos
Los autores agradecen a los departamentos de producción y técnico de Geocisa y en particular a Ángel Grande Alcázar (jefe de Grupo de Obras) y Javier Muñoz Fernández (jefe de Obra), por facilitar la información necesaria para escribir este artículo.
Bibliografía
- Armijo, G. (1995). Influencia de los métodos de mejora del terreno en la resistencia de suelos flojos frente a terremotos, Tesis Doctoral, E.T.S. de Ing. de Caminos, Canales y Puertos, Universidad Politécnica de Madrid.
- Armijo, G. (2004). Ground improvement to avoid liquefaction risk, ASEP-GI 2004, LCPC, París, p. 45-57.
- Lukas (2005). Dynamic compaction, Geotechnical Engineering Circular Nº 1, FHWA, Washington D.C.
- Mayne, P.W.; Jones, J.S. & Dumas, J.C. (1984). Ground response to dynamic compaction, J. Geotechnical Engineering Division, ASCE 110, pp. 757-772.






































")