
Pruebas de ADAS/AD basadas en escenarios con DYNA4 R8
Vector Informatik presenta la versión 8 de DYNA4, el software de simulación para pruebas virtuales de conducción. La atención se centra en el nuevo motor de escenarios, que ahora soporta de forma nativa el estándar ASAM OpenSCENARIO 1.2 como formato de entrada para la descripción de escenarios complejos de pruebas de conducción.
De este modo, DYNA4 ofrece pruebas basadas en escenarios de las funciones de control del vehículo con una integración perfecta de los estándares ASAM OpenSCENARIO, OpenDRIVE y OSI. De este modo, los extensos catálogos de escenarios modelados se reutilizan de forma coherente a lo largo de todo el proceso de desarrollo de la ECU y en diversos entornos de ejecución de simulaciones.
OpenSCENARIO: el estándar para pruebas basadas en escenarios
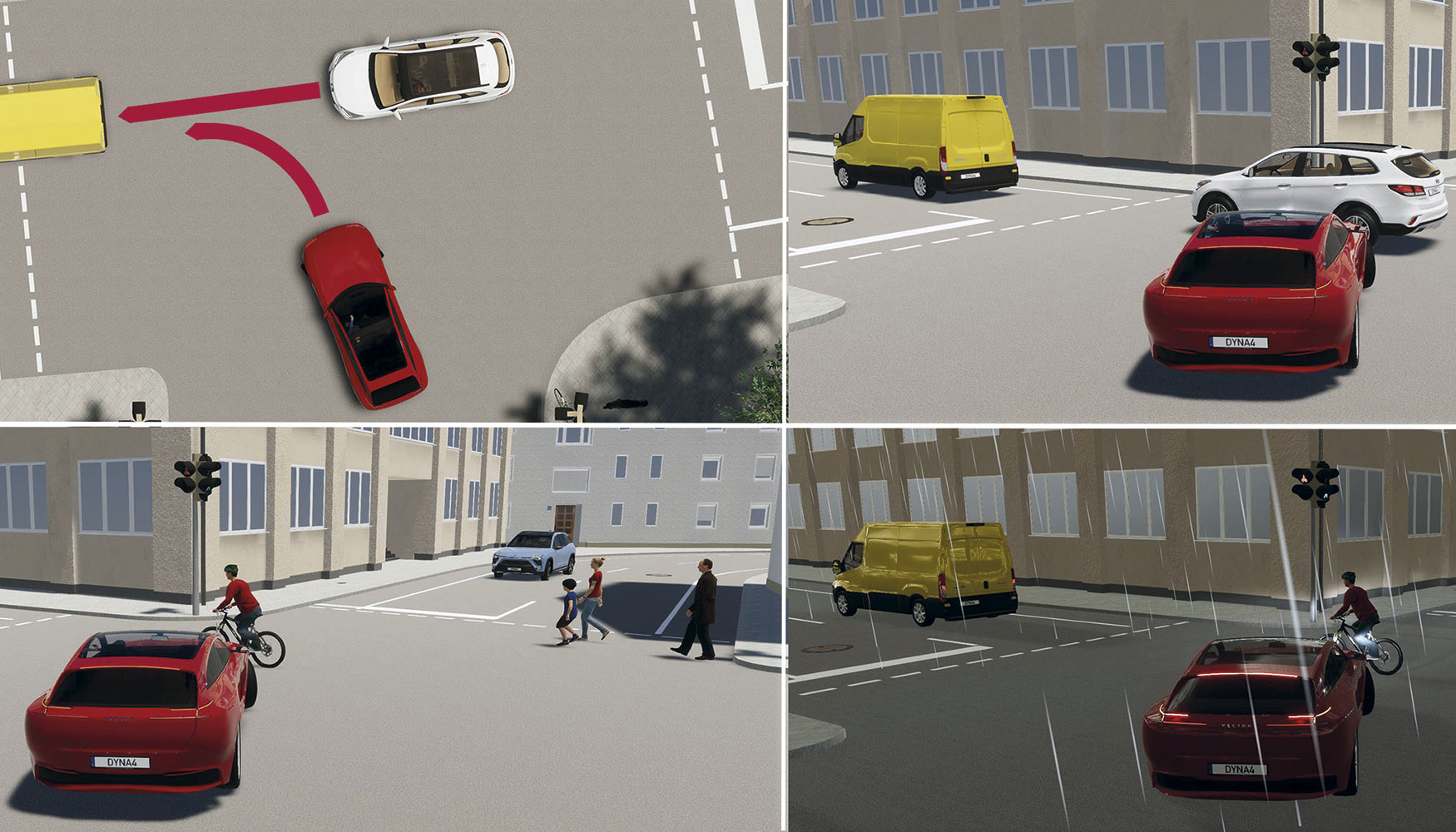
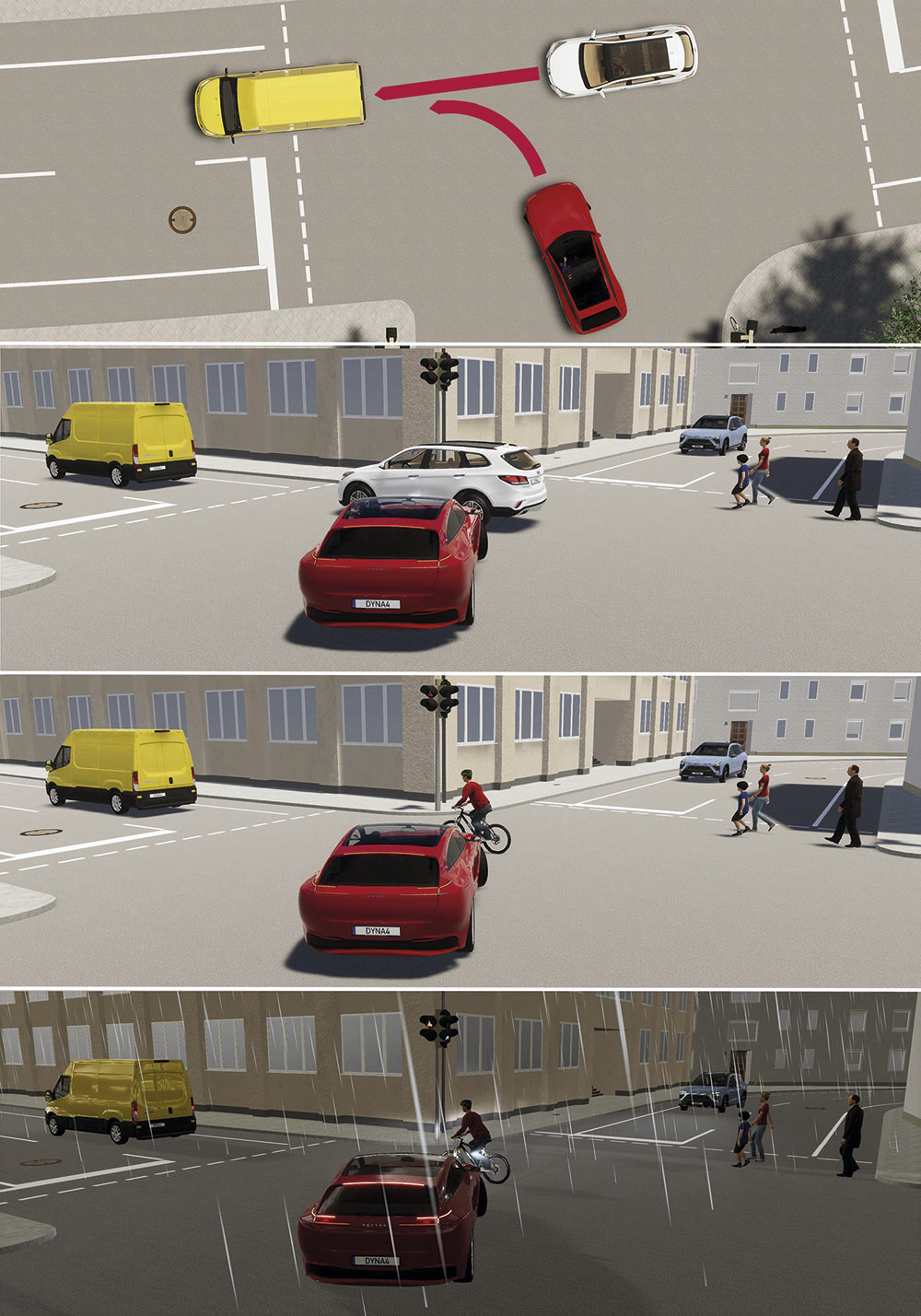
El estándar OpenSCENARIO de ASAM define un formato de descripción para modelar la parte dinámica de los escenarios de conducción para pruebas virtuales. Por ejemplo, las maniobras de los usuarios de la carretera, como vehículos circundantes, peatones y ciclistas. La parte estática de un escenario, como la red de carreteras subyacente, se modela basándose en el estándar complementario OpenDRIVE. El nuevo motor de escenarios de DYNA4 ofrece ahora la simulación de escenarios de conducción modelados en el formato OpenSCENARIO. El estándar describe una amplia gama de Acciones que pueden influir en el comportamiento de las Entidades implicadas en el escenario, así como Condiciones que sirven como condiciones desencadenantes para el inicio de Acciones
Esto permite modelar escenarios de tráfico con cualquier grado de complejidad. Durante la ejecución del escenario, DYNA4 permite un acceso flexible a las señales simuladas del modelo. Para leer valores para disparar Condiciones. O para escribir valores para realizar manipulaciones de señales, por ejemplo, para una inyección de fallo dirigida.
El soporte nativo de los estándares ASAM en DYNA4 ofrece un uso máximo y consistente de los escenarios modelados a lo largo de todo el proceso de desarrollo de la ECU. Esto no sólo aumenta la eficacia de las pruebas de funcionamiento basadas en la simulación, sino que también garantiza la seguridad de la inversión al crear catálogos de escenarios completos.
Los modelos físicos de DYNA4 o su módulo de motor de escenarios pueden integrarse en otras cadenas de herramientas con estándares ASAM. Los problemas de interfaz a la hora de transmitir datos reales generados o datos de sensores simulados se evitan mediante la compatibilidad con el formato ASAM OSI.
Cámaras virtuales para ECUs reales
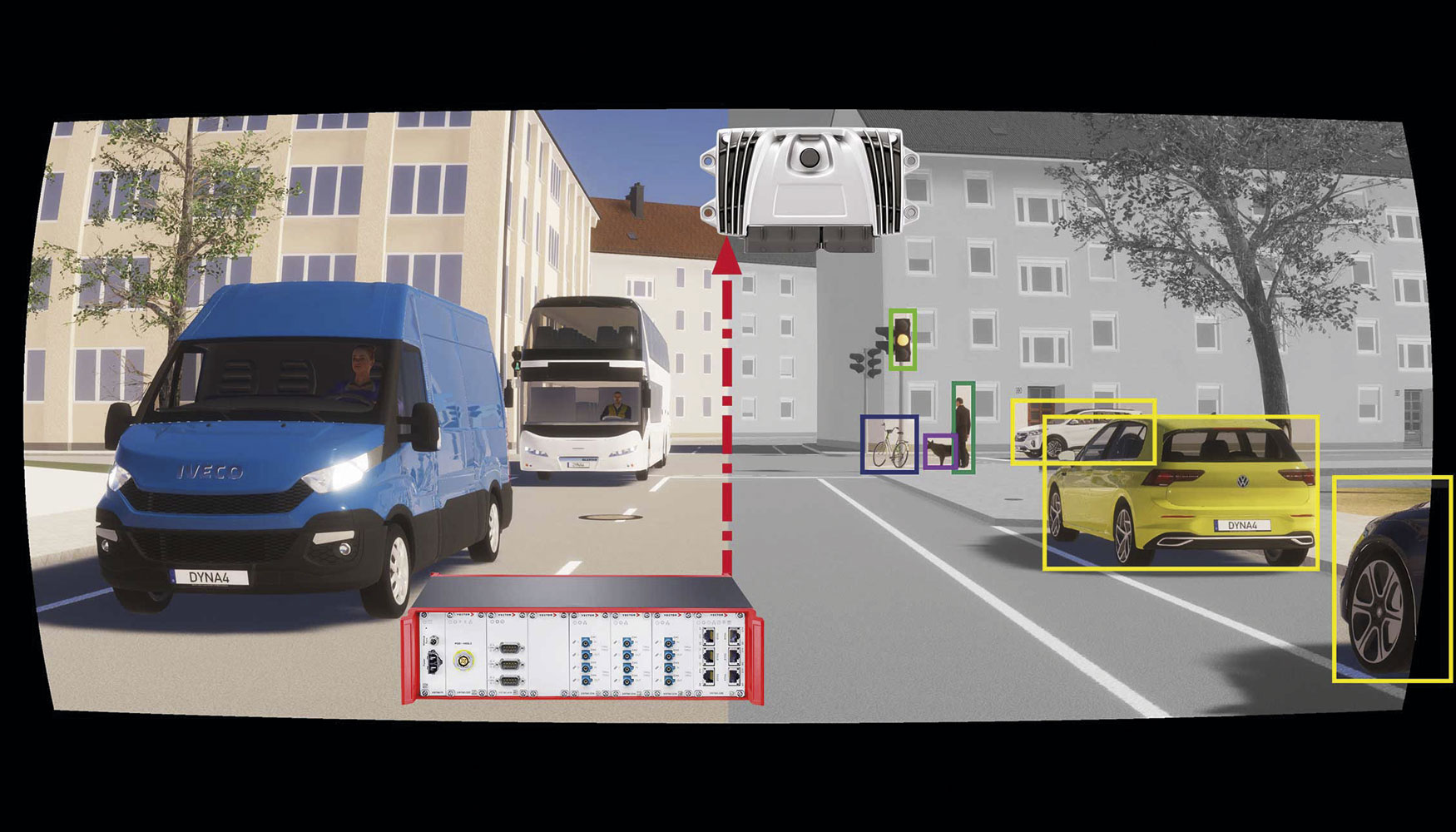
Otra novedad de DYNA4 R8 es la inyección directa de imágenes de cámaras simuladas en una ECU ADAS. Las cámaras virtuales disponibles para este fin en DYNA4 ofrecen diferentes modelos de distorsión para lentes regulares u ojo de pez con una gama de efectos de imagen aplicables y patrón de filtro Bayer configurable, según el CMOS utilizado. Para la inyección directa a una ECU, las imágenes generadas mediante simulación en tiempo real se envían a través de Ethernet al módulo multibase Vector VX1161. El módulo las emite como secuencias de imágenes serializadas a través de FPD-Link III o GMSL utilizando las tarjetas de interfaz de secuencias VX1161.51. T
El código de función ADAS de la ECU procesa las imágenes de cámara virtual inyectadas para realizar sus tareas de detección, fusión, seguimiento y planificación. Cuando las salidas de la ECU se reciben con las interfaces de red Vector VN o las tarjetas del sistema VT, se pueden volver a introducir en el modelo de vehículo virtual DYNA4. De este modo se crea un sistema de pruebas hardware-in-the-loop para ECUs ADAS.








