Nuevo récord de mínimo Drift en navegación sin GNSS del Sistema de UAV Navigation
La ejecución segura, robusta y eficiente del vuelo sin GNSS es una clara necesidad del mercado. UAV Navigation apuesta por la integración y fusión simultánea de varios sistemas u observadores embarcados para hacer frente a los escenarios más desafiantes.
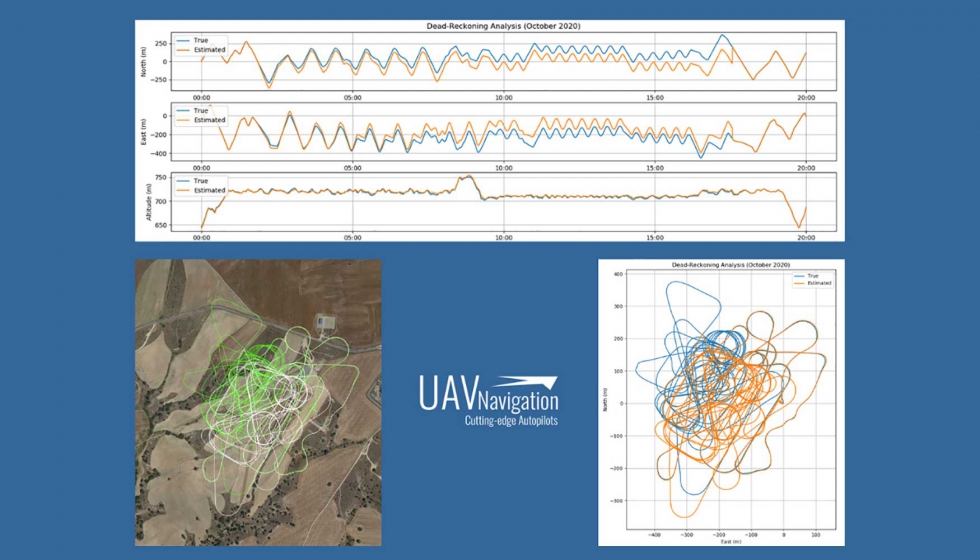
En este caso el equipo ha puesto a prueba la capacidad INS (inercial) del sistema VECTOR-600, simulando un fallo en el sistema obligándole a operar únicamente con los sensores inerciales y el magnetómetro para determinar su posición y ejecutar el guiado. En este escenario, el sistema comienza a estimar su posición propagando su estado, mediante la integración iterativa de sus sensores inerciales y de velocidad de datos aire. Esto produce inevitablemente y debido a esta integración, una acumulación de error que se traduce en una deriva de posición en el tiempo.
En estas condiciones difíciles, donde una mala estimación de viento o un nivel de vibraciones elevado tiene una repercusión muy negativa es donde verdaderamente se ve la calidad de los sistemas de guiado, navegación y control.
La unidad ADAHRS-INS, basada en tecnología MEMS, diseñada por UAV Navigation, y que ha derivado en la familia de AHRS POLAR y que se incluye en toda su gama de autopilotos VECTOR es capaz de operar en este difícil escenario con derivas de posición tan bajas como 16 metros/minuto.
Delegar la navegación a sistemas basados casi de manera exclusiva a la señal GNSS conlleva riesgos que deben ser minimizados con el fin de garantizar la seguridad operación. Es por ello que un sistema capaz de operar con eficiencia y precisión, incluso en ausencia de señal GNSS, cobra especial relevancia para la operación profesional de UAVs.